


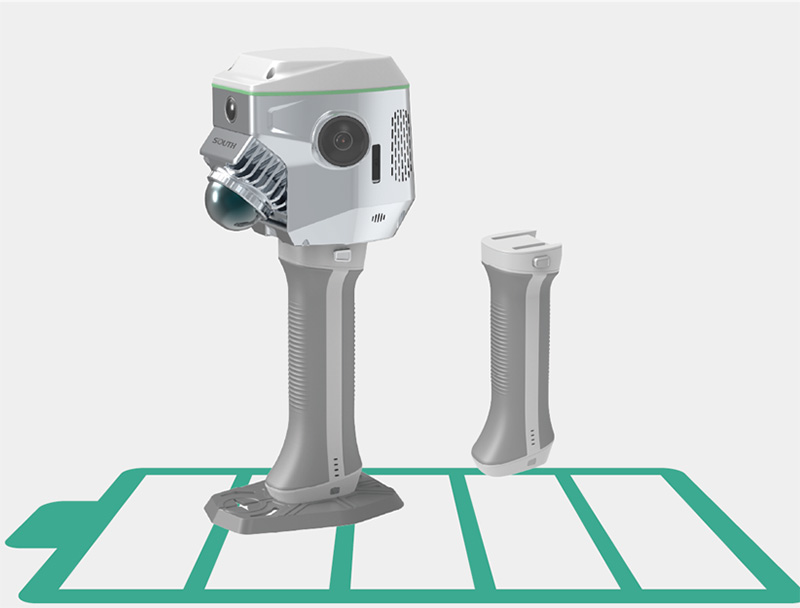
南方覓境RTK激光SLAM測量系統 新品發布
南方測繪推出的南方覓境RTK激光SLAM系統,是一款融合實時動態定位(RTK)與激光
SLAM(同步定位與建圖)技術的高精度移動測量解決方案。該系統針對復雜室內外一體化
測繪需求設計,廣泛應用于地形測繪、城市三維建模、電力巡檢、地下空間測量、智慧交通
等領域,能夠實現全域高精度、全天候作業,大幅提升測繪效率與數據可靠性。

1. 多傳感器融合架構
南方覓境RTK激光SLAM系統采用模塊化多傳感器集成設計,主要硬件包括:
激光雷達(LiDAR):采用高線數(如16線、32線或更高)激光雷達,每秒發射數萬至數
十萬激光點,實現高密度三維環境掃描,適用于精細建模。
高精度GNSS/INS組合導航:
RTK GNSS:支持北斗、GPS、GLONASS等多系統,在開闊環境下提供厘米級(1-2cm)
絕對定位。
慣性測量單元(IMU):在GNSS信號遮擋時(如室內、隧道、高樓間)維持短時間高精度
航位推算。
全景相機(可選):同步采集360°高清影像,與激光點云融合生成真彩色三維模型。
里程計與輔助傳感器:輪速計、氣壓計等輔助提升SLAM穩定性。

2. RTK與激光SLAM無縫切換技術
室外開闊區域:優先使用RTK GNSS提供全局坐標,精度達1-2cm。
GNSS拒止環境(如室內、地下、森林):自動切換至激光SLAM模式,通過點云匹配實現
連續定位,平面精度5-10cm(經閉環優化后可提升)。
混合區域(如城市峽谷):采用緊耦合融合算法,結合GNSS、IMU與激光SLAM數據,確
保定位無間斷。
3. 智能SLAM算法優化
抗動態干擾:通過時序濾波和語義分割技術,過濾行人、車輛等移動物體對點云的干擾。
閉環檢測與全局優化:自動識別重復場景,修正累積誤差,確保大范圍建圖的一致性。
多源數據融合:融合IMU、里程計等數據,提升復雜環境下的魯棒性。
1. 全場景高精度覆蓋
室外RTK模式:1-2cm平面精度,滿足測繪級需求。
室內SLAM模式:5-10cm精度,支持無GNSS環境作業。
混合模式:適用于城市街道、地下停車場等過渡區域,確保數據無縫銜接。

2. 高效作業能力
單人可操作:支持背包、車載、無人機等多種搭載方式,單日可完成10-15公里線路測量
(視電池配置)。
實時預覽與質檢:內置邊緣計算單元,實時顯示點云與軌跡,外業即可檢查數據質量。
3. 強大的后處理軟件支持
SouthLidar點云處理軟件:提供去噪、分類、建模、斷面分析等功能,支持輸出LAS、
DXF、OBJ等格式。
GIS/BIM兼容:無縫對接ArcGIS、AutoCAD、Revit等平臺,助力智慧城市與數字孿生應用。
1. 城市三維建模與智慧城市
快速獲取建筑立面、道路、綠化帶的高精度點云,用于數字孿生、違建監測、規劃審批。
結合BIM技術,輔助建筑竣工測量與室內導航。
2. 電力與能源設施巡檢
輸電線路通道掃描,自動提取導線弧垂、桿塔傾斜度等參數。
變電站、風電場地形測繪,兼容無人機數據融合。
3. 地下空間與交通工程
隧道、地鐵、管廊的斷面測量與變形分析,無需控制點布設。
高速公路、鐵路軌道的精細化建模與養護評估。
4. 應急測繪與災害評估
地震、滑坡等災害現場快速三維重建,為救援決策提供實時空間數據。
國產化自主可控
從硬件(激光雷達、GNSS)到軟件(SLAM算法、后處理平臺)均為南方測繪自主研發,
符合國產化替代趨勢。
性價比突出
相比進口同類設備(如RIEGL、Leica),成本降低30%-50%,維護服務更便捷。
適應性強
可靈活選配不同精度激光雷達或相機模塊,滿足從工程測繪到科研級需求。

南方覓境RTK激光SLAM系統通過RTK+SLAM的創新融合,解決了傳統測繪在GNSS
拒環境下的技術瓶頸,實現了“室內外一體化、全域高精度”的測量能力。其高效率、
低成本、強適應性的特點,使其成為新型基礎測繪、智慧城市建設和行業數字化轉型的
重要具。隨著AI算法的持續優化(如語義SLAM、自動分類),該系統在未來自動駕駛
高精地圖、機器人導航等領域亦具有廣闊應用前景。
更多相關

中海達sRTK激光RTK工程測量系統 新品發布
中海達sRTK激光RTK工程測量系統:高精度測量的全域解決方案 在工程測量實踐中,傳統sRTK技術雖能提供廣闊的厘米級定位能力,但在樹木茂密、樓宇角落等衛星信號...
南方測繪覓境ME測量系統
南方測繪推出的覓境ME測量系統,是一款集先進性、智能性與便捷性于一身的三維實景采集利器,旨在為用戶提供一站式的空間數據解決方案,重新定義三維測量的工作模式。一...

南方 覓境RTK 激光SLAM
覓境ME系列測量系統是一款融合RTK、激光SLAM、機器視覺、組合導航等技術的全新智能化測繪裝備,多元技術深度融合,具備在密林、樓宇、室內等弱GNSS信號或無GNSS信號區域主動感知與探索的能力,實現...

中海達sRTK 激光RTK工程測量系統
中海達sRTK激光RTK工程測量系統全星座全頻段,信號強,數據好新一代GNSSSoC芯片,低功耗,續航長;1408通道,支持北斗三號衛星新頻點B1C、B2a和B2bRTK解算;多信號多頻段一體化高...
 環球測繪微信
環球測繪微信